정렬은 오름차순, 내림차순과 같은 방식으로 특정 필드값인 key를 기준으로 value간의 정렬을 진행해 주며 다음 2가지로 나뉜다.
단순, 비효율적 방법:삽입, 선택, 버블 정렬 ==> 대개 자료의 개수가 적을 때 사용 복잡, 효율적인 방법: 힙, 합병, 퀵 정렬 ==> 반드시 자료의 개수가 많다면 효율적 알고리즘을 사용해야 함.
🧐 간단하지만, 비효율적인 정렬 방법
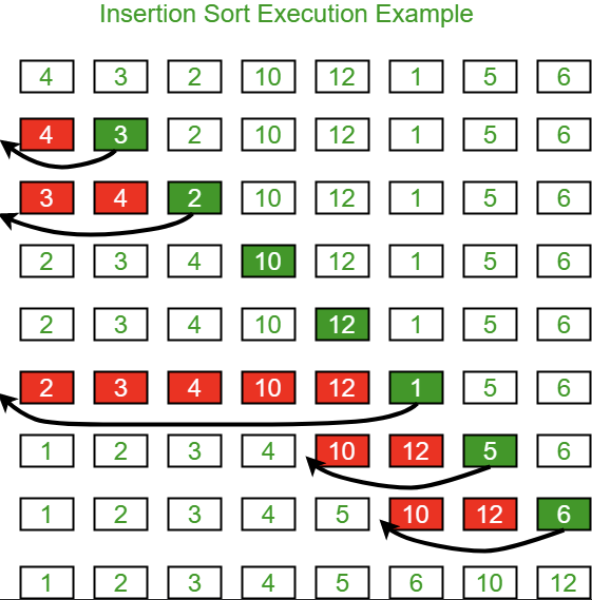
👉 삽입 정렬 (insertion Sort)
삽입정렬은 마치 카드놀이 새 카드를 받는 것 처럼 정렬한 카드들 사이의 올바른 자리에 넣는 것이다.
삽입정렬 방식은 다음과 같이 진행된다.
🤨 insertion sort Algorithm
insertionSort(A, n)
for i <- 1 to n-1 do key <- A[i]; j <- i-1; while j ≥ 0 and A[j] > key do A[j+1] <- A[j]; j <- j-1; A[j+1] <- key
void insertionSort (int A[], int n) {
for (int i = 0; i < n; i++) {
int key = A[i];
int j;
for (j = i-1; j >= 0 && A[j] > key; j--)
A[j+1] = A[j];
A[j+1] = key;
}
}
👉 선택 정렬 (Selection Sort)
가장 이해하기 쉬운 정렬방법으로 오른쪽 리스트가 공백상태가 될 때까지 오른쪽 리스트에서 왼쪽리스트로 가장 작은 숫자를 선택해 이동시킨다.
이렇게 입력배열 이외에 다른 추가 메모리를 요구하지 않는 정렬방법을 제자리 정렬이라 한다.
🤨 selection sort Algorithm
selectionSort (A, n)
for i <- 0 to n-2 do least <- A[i], A[i+1], . . . , A[n-1] 중 가장 작은 값의 idx; A[i]와 A[least]의 교환; i++;
void selectionSort (int A[], int n) {
for (int i = 0; i < n-1; i++) {
int least = i;
for (int j = i+1; j < n; j++)
if (A[j] < A[least])
least = j;
swap(A[i], A[least]);
}
}
👉 버블 정렬 (Bubble Sort)
마치 거품이 일어나듯 인접한 2개의 인덱스 값들을 서로 비교하여 큰 값을 오른쪽에 두도록 서로 swapping 하는 것으로 과정은 아래와 같다.
정렬은 오름차순, 내림차순과 같은 방식으로 특정 필드값인 key를 기준으로 value간의 정렬을 진행해 주며 다음 2가지로 나뉜다.
단순, 비효율적 방법:삽입, 선택, 버블 정렬 ==> 대개 자료의 개수가 적을 때 사용 복잡, 효율적인 방법: 힙, 합병, 퀵 정렬 ==> 반드시 자료의 개수가 많다면 효율적 알고리즘을 사용해야 함.
🧐 복잡하지만, 효율적인 정렬 방법
👉 힙 정렬 (Heap Sort)
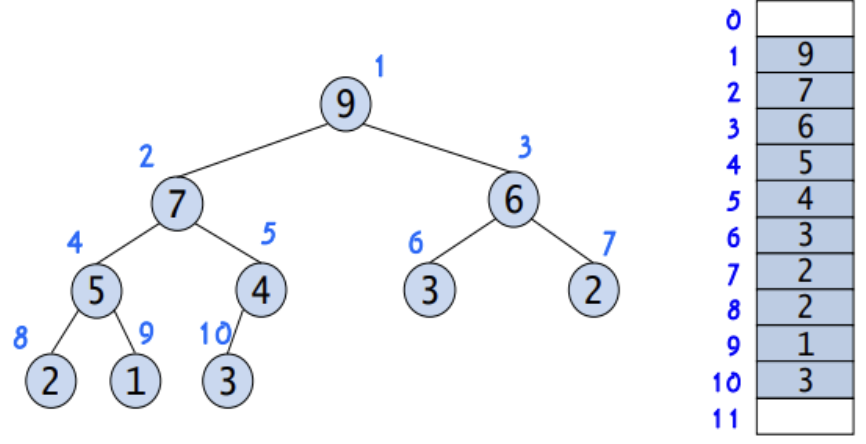
힙 (heap)은 완전 이진트리(complete binary tree)의 일종으로 우선순위 큐를 위해 만들어진 자료구조다.
힙(heap)은 요소들이 완전히 정렬된 것은 아니지만일종의 반 정렬상태를 유지한다. 이로 인해삽입 삭제의 시간복잡도가 O(log n)으로 다른 방법보다 훨씬 유리하다.
이런 힙은여러 개의 값들 중 최댓값과 최솟값을 빠르게 찾아내기 위해 만들어진 자료구조이다. 이를 위해부모 노드의 key 값 > 자식 노드의 key 값 을 항상 만족하도록 만들어졌다. (보통 최대힙으로 가정하는 편) 단, BST와는 다르게Heap tree는 중복된 값을 허용한다.
- 위는 힙에 대한 설명으로 힙정렬은 다음과 같은 방식으로 진행한다.
1. 정렬할 배열을 먼저 최소 힙으로 변환한다. 2. 가장 작은 원소부터 차례대로 추출한다.
#include <queue>
#include <functional> //최소 힙을 사용하기에 써줘야 함
using namespace std;
// 최대 힙을 사용한 내림차순 정렬
void heapSortDec(int arr[], int n) {
priority_queue<int> maxHeap;
for (int i = 0; i < n; i++) {
maxHeap.push(arr[i]);
}
// maxHeap을 이용해 내림차순으로 정렬
for (int i = 0; i < n; i++) {
arr[i] = maxHeap.top();
maxHeap.pop();
}
}
// 최소 힙을 사용한 오름차순 정렬
void heapSortInc(int arr[], int n) {
priority_queue<int, vector<int>, greater<int> > minHeap;
for (int i = 0; i < n; i++) {
minHeap.push(arr[i]);
}
// minHeap을 이용해 오름차순으로 정렬
for (int i = 0; i < n; i++) {
arr[i] = minHeap.top();
minHeap.pop();
}
}
👉 합병 정렬 (Merge Sort)
합병정렬은 분할 정복(divide and conquer)기법을 바탕으로 두고 있다.
🤨 Divide and Conquer란?
1. 하나의 리스트를 2개의 균등한 크기로 분할 (점점 작은 sub problem을 만드는 방법) 2. 분할을 계속 지속해서 1개의 원소로 나눈 후 정렬 진행 3. 두 원소씩 다시 합쳐 전체가 정렬된 리스트를 만드는 방법
🤨merge Algorithm
merge(A, left, mid, last) b1 <- left; e1 <- mid; b2 <- mid + 1; e2 <- right; sorted 배열을 생성; index <- 0; while b1 ≤ e1 and b2 ≤ e2 do if (A[b1] < A[b2]) then sorted[idx] <- A[b1]; b1++; idx++; else sorted[idx] <- A[b2]; b2++; idx++; 요소가 남아있는 부분배열을 sorted로 복사; sorted를 A로 복사;
🤨merge sort Algorithm
mergeSort (A, left, right) if left < right mid = (left + right) / 2; mergeSort(A, left, mid); mergeSort(A, mid + 1, right) merge(A, left, mid, right)
#define Max_Size 1024
static void merge(int A[], int left, int mid, int right) {
int i, j, k = left, l;
static int sorted[Max_Size];
for (i = left, j = mid + 1; i <= mid && j <= right; )
sorted[k++] = (A[i] <= A[j]) ? A[i++] : A[j++];
if (i > mid)
for (l = j; l <= right; l++, k++)
sorted[k] = A[l];
else
for (l = i; l <= mid; l++, k++)
sorted[k] = A[l];
for (l = left; l <= right; l++)
A[l] = sorted[l];
}
void mergeSort (int A[], int left, int right) {
if (left < right) {
int mid = (left + right) / 2;
mergeSort(A, left, mid);
mergeSort(A, mid + 1, right);
merge(A, left, mid, right);
}
}
👉 퀵 정렬 (Quick Sort)
평균적으로 매우 빠른 속도를 자랑하는 정렬방법으로 위의 합병정렬같은 분할 정복(divide and conquer)기법을 바탕으로 두고 있다.
다만 합병정렬과는 달리 리스트를 균등하게 분할하지 않고 리스트 안의 한 요소를 pivot으로 선택한다.
퀵정렬의 과정은 아래와 같이 진행된다.
🤨 퀵 정렬 과정
1. 리스트에서 하나의 원소, pivot을 고른다. 2. pivot앞에는 보다 값이 작은 모든 원소들이, pivot 뒤에는 보다 값이 큰 모든 원소들이 오도록 pivot을 기준으로 리스트를 둘로 나눈다(분할). 분할을 마친 후 pivot은 더 이상 움직이지 않는다. 3. 분할된 두 개의 작은 리스트에 대해 재귀(Recursion)적으로 이 과정을 반복한다. 재귀는 리스트의 크기가 0이나 1이 될 때까지 반복된다.
이를 위해 중요한 3개의 함수가 사용된다. - quickSort: 퀵정렬 알고리즘을 이용해 배열의 left ~ right를 오름차순으로 정렬. - partition: 퀵정렬에서 가장 중요한 함수로 pivot을 설정, 데이터를 left, right로 크기에 따라 이동시킴. - swap: 조건에 따라 pivot기준으로 왼쪽과 오른쪽의 값들을 서로 바꿔주기 위한 함수
https://coding-factory.tistory.com/615
#include <iostream>
using namespace std;
static int partition(int A[], int left, int right) {
int low = left;
int high = right + 1;
int pivot = A[low];
do {
do {
low++;
} while (low <= high && A[low] < pivot);
do {
high--;
} while (high >= left && A[high] > pivot);
if (low < high)
swap(A[low], A[high]);
} while (low < high);
swap(A[left], A[high]);
return high;
}
void quickSort (int A[], int left, int right) {
if (left < right){
int q = partition(A, left, right);
quickSort(A, left, q - 1);
quickSort(A, q + 1, right);
}
}
우선순위 큐는 다양한 방법(배열, 연결리스트, ...)으로 구현할 수 있지만 가장 효율적인 구조는 힙(Heap)이다.
이런 우선순위 큐는 어떤 요소가 먼저 삭제될 것인지에 따라 다음 2가지로 나뉜다.
최대 우선순위 큐: 우선순위가 가장 높은 것 먼저 삭제 최소 우선순위 큐: 우선순위가 가장 낮은 것 먼저 삭제
※ 힙 (Heap)
힙 (heap)은 완전 이진트리(complete binary tree)의 일종으로 우선순위 큐를 위해 만들어진 자료구조다.
힙(heap)은 요소들이 완전히 정렬된 것은 아니지만 일종의 반 정렬상태를 유지한다. 이로 인해 삽입 삭제의 시간복잡도가 O(log n)으로 다른 방법보다 훨씬 유리하다.
이런 힙은 여러 개의 값들 중 최댓값과 최솟값을 빠르게 찾아내기 위해 만들어진 자료구조이다. 이를 위해 부모 노드의 key 값 > 자식 노드의 key 값 을 항상 만족하도록 만들어졌다. (보통 최대힙으로 가정하는 편) 단, BST와는 다르게 Heap tree는 중복된 값을 허용한다.
- 최대 힙 (max heap)
key(부모) ≥ key(자식)
- 최소 힙 (min heap)
key(부모) ≤key(자식)
✯ 힙의 기본 틀
왼쪽 자식의 index = 부모 index * 2 오른쪽 자식의 index = 부모 index* 2 + 1
∴ 부모의 index = 자식의 index / 2
※ MaxHeap의삽입연산 (insert)
힙에 새로운 요소가 들어오면 1. 힙의 마지막 노드에 이어서 새 노드를 삽입 2. 삽입 후 새 노드를 부모노드와 교환하여 힙의 성질을 만족시켜준다.
✯ BST의 insert Algorithm
insert (key)
heapSize <- heapSize + 1;
i <- heapSize;
node[i] <- key;
while i != 1 and node[i] > node[PARENT(i)] do
node[i] ↔ node[PARENT(i)]; // 노드를 서로 교환
i <- PARENT(i);
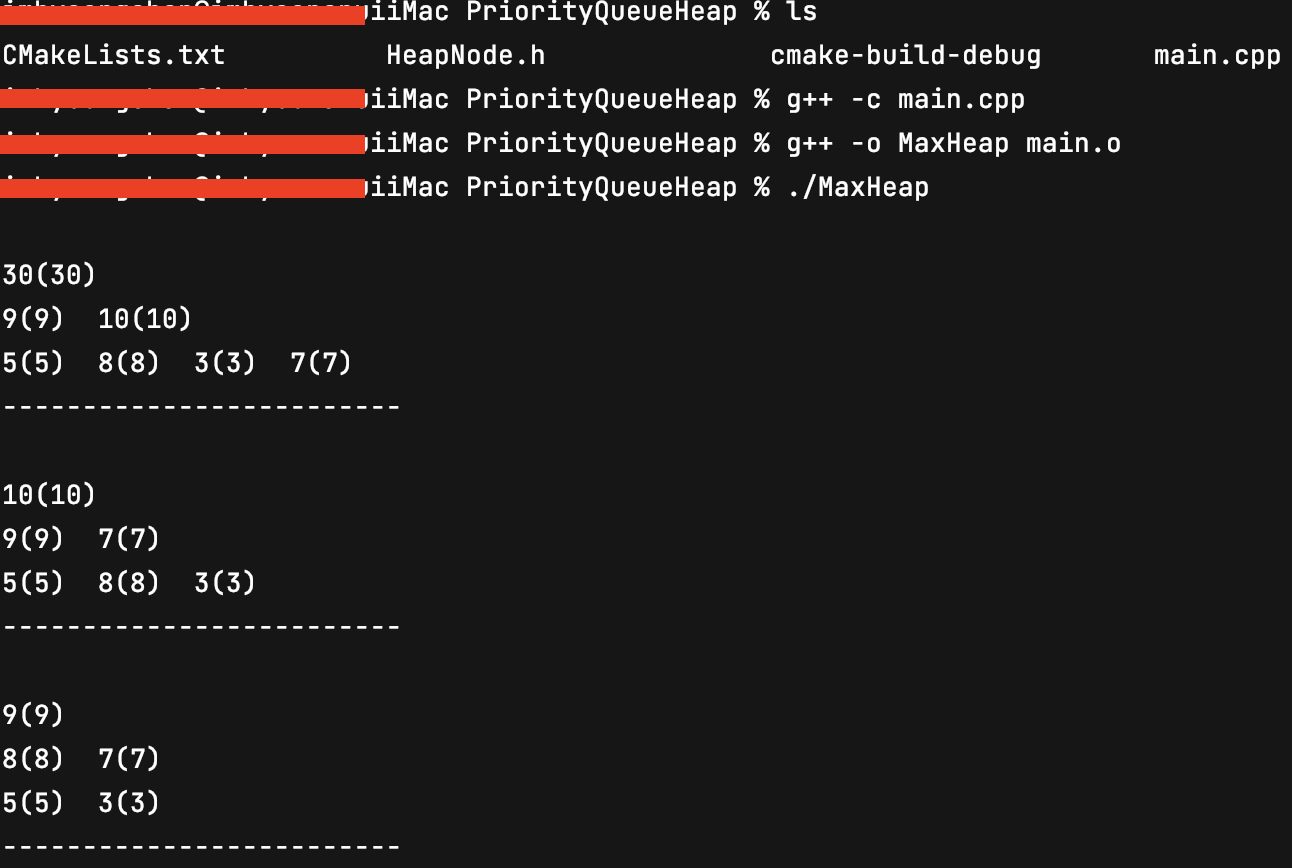
※ MaxHeap의삭제연산 (delete)
1. 먼저 root노드 삭제 후, 빈 루트에 힙의 마지막 노드를 가져 온다. (레벨순회 순 마지막 노드) 2. 순차적으로 강등 진행 (자식들 중 더 큰 값과 교환 진행)
✯ BST의 delete Algorithm
remove()
item <- A[1];
A[1] <- A[HeapSize];
i <- 2;
while i ≤ heapSize do
if i <heapSize nad A[LEFT(i)] > A[RIGHT(i)]
then largest <- LEFT(i);
else largest <- RIGHT(i);
if A[PARENT(largest)] > A[largest]
then break;
A[PARENT(largest)] ↔ A[largest];
i <- LEFT(largest);
return item;
※ MaxHeap 구현
- HeapNode.h
#include <iostream>
#define MAX_ELEMENT 200 // heap array size
using namespace std;
template <typename T>
class Node{
private:
int key;
T data;
public:
Node(){ key = 0; }
Node(int key, T _data){
this->key = key;
this->data = data;
}
~Node(){}
// getter/setter
int getKey(){ return key; }
void setKey(int key){ this->key = key; }
T getData(){ return data; }
void setData(T data){ this->data = data; }
};
template <typename T>
class MaxHeap{
private:
Node<T> node[MAX_ELEMENT];
int size; // heap 요소 개수
public:
MaxHeap(){ size = 0; }
~MaxHeap(){}
// search node
Node<T>& getParent(int index){
return node[index/2];
}
Node<T>& getLeftChild(int index){
return node[index*2];
}
Node<T>& getRightChild(int index){
return node[index*2+1];
}
// 삽입
void insert(int key, T data){
if(isFull()){
cout << "Heap is Full" << endl;
return;
}
int index = ++size; // 힙트리 마지막 노드의 다음 위치에서 시작
// 힙트리를 거슬러 올라가며 부모 노드와 비교
while(index != 1 && key > getParent(index).getKey()){
node[index] = getParent(index);
index /= 2;
}
// 최종 위치에 데이터 삽입
node[index].setKey(key);
node[index].setData(data);
}
// 삭제
T remove(){
if(isEmpty()){
cout << "Heap is Empty" << endl;
exit(EXIT_FAILURE);
}
Node<T> itemNode = node[1]; // root node (삭제 대상)
Node<T> lastNode = node[size--]; // 힙트리의 마지막 노드
int index = 1; // 마지막 노드의 index (root 부터 시작)
// root 부터 내려가며 자식 노드와 비교
while(index <= size){
if(index*2 > size){ // leaf node인 경우 (자식 노드가 없는 경우)
break;
}
else if(index*2 == size){ // 자식노드가 하나인 경우
if(lastNode.getKey() < getLeftChild(index).getKey()) {
node[index] = getLeftChild(index);
index *= 2;
}
else
break;
}
else{ // 자식노드가 두개인 경우
int leftChildKey = getLeftChild(index).getKey();
int rightChildKey = getRightChild(index).getKey();
// 둘 중 key가 더 큰 자식노드와 교환
if(lastNode.getKey() < leftChildKey || lastNode.getKey() < rightChildKey){
node[index] = leftChildKey > rightChildKey ? getLeftChild(index) : getRightChild(index);
index = leftChildKey > rightChildKey ? index*2 : index*2+1;
}
else
break;
}
}
node[index] = lastNode; // 마지막 노드를 최종 위치에 저장
return itemNode.getData(); // 삭제 노드의 data 반환
}
// 출력
void display(){
int level = 1;
for(int i=1; i<= size; i++){
if(i == level){
cout << endl;
level *= 2;
}
cout << node[i].getData() << "(" << node[i].getKey() << ") ";
}
cout << '\n' << "-------------------------" << endl;
}
bool isEmpty(){ return size == 0; }
bool isFull(){ return size == MAX_ELEMENT - 1; }
};
search (root, key)
if root == null
then return null;
if key = KEY(root)
then return root;
else if key < KEY(root)
then return search(LEFT(root), key);
else return search(RIGHT(root), key);
key값으로 node를 탐색하는 함수로 2가지 방식으로 구현이 가능하다.
- 순환적인 방법
BinaryNode *search(BinaryNode *n, int key){
if (n == NULL) return NULL;
if (key == n->getData()) return n; // key == 현재 node의 data
else if (key < n->getData()) return search(n->getLeft(), key); // key < 현재 node의 data
else return search(n->getRight(), key); // key > 현재 node의 data
}
- 반복적인 방법 (효율성의 측면에서 훨씬 우수)
BinaryNode *search(BinaryNode *n, int key){
while(n != nullptr){
if(key == n->getData())
return n;
else if(key < n->getData())
n = n->getLeft();
else
n = n->getRight();
}
return nullptr;
}
※ BST의 삽입연산 (insert)
BST에서 삽입을 위해 탐색이 선행되어야 한다!
( ∵ BST에서는 같은 key값을 갖는 node가 없어야 하기 때문! )
( ∵ BST에서는탐색에 실패한 위치 = NULL값 = new node를 insert하는 위치 )
✯ BST의 insert Algorithm
insert (root, n)
if KEY(n) == KEY(root)
then return;
else if KEY(n) < KEY(root) then
if LEFT(root) == null
then LEFT(root) <- n;
else insert(LEFT(root), n);
else
if RIGHT(root) == null
앞의 두 연산보다 더욱 중요한 연산으로 BST에서 가장 복잡한 연산이다. 다음 3가지의 경우를 고려해야 하기 때문이다.
case1. 삭제하려는 node가 leaf node인 경우. --> 그냥 삭제하면 되서 가장 간단! case2. 삭제하려는 node가 왼쪽이나 오른쪽 sub tree중 하나만 갖는 경우 --> 해당 sub tree를 부모로! case3. 삭제하려는 node가 양쪽 sub tree 모두 갖는 경우 --> 가장 복잡!
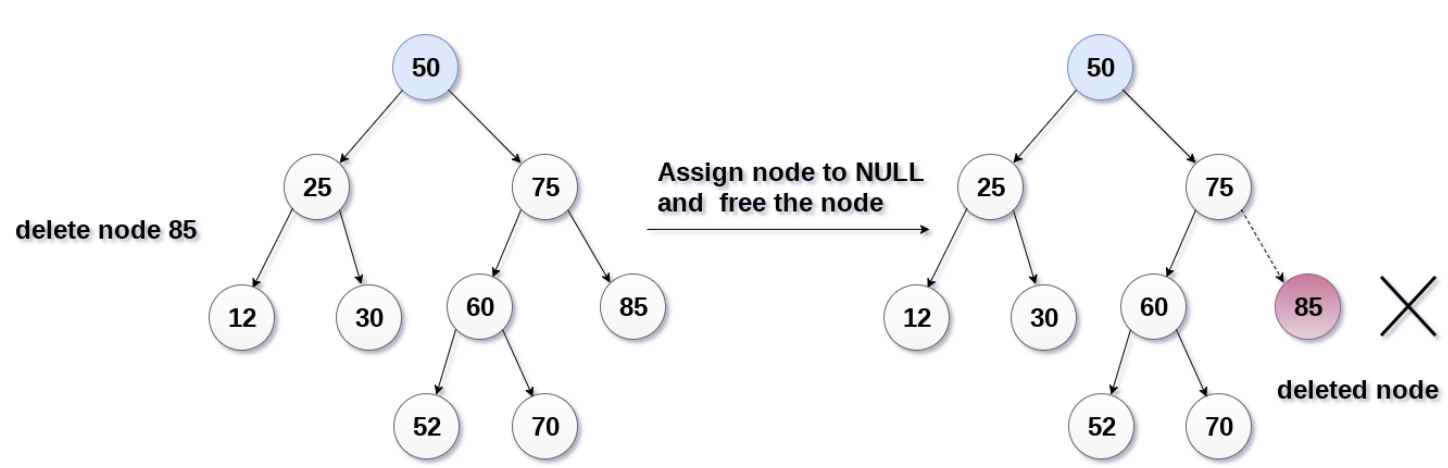
➣ case 1. 삭제 node가 leaf node
i) 부모 노드를 찾아서 ii) 부모 노드의 link 영역을 nullptr로 만든다. iii) leaf node를 최종적으로 동적으로 해제한다. 즉, 부모 노드를 반.드.시! 알아야 한다!
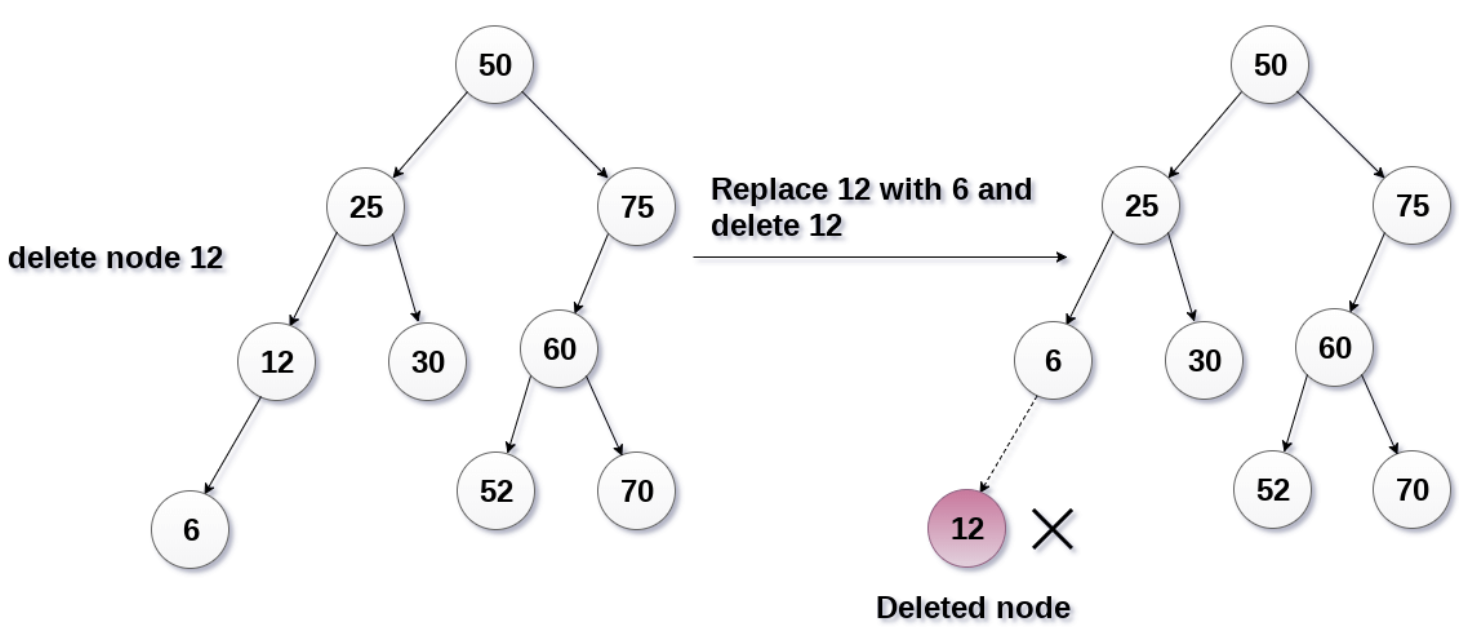
➣ case 2. 삭제 node가 sub tree 하나만 갖고 있음
i) 해당 노드는 삭제하고 ii) 유일한 자식을 부모 노드에 붙여준다. 즉, 부모와 자식노드를 둘 다! 알아야 한다!
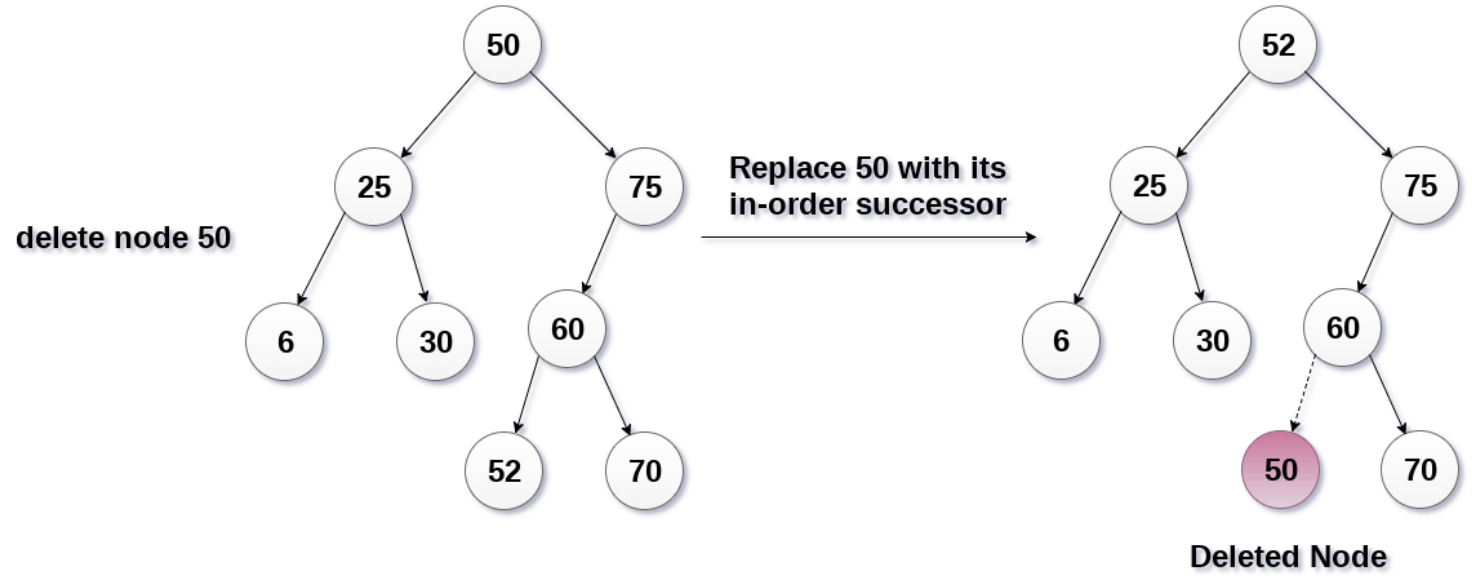
➣ case 3. 삭제 node가 sub tree 모두 갖고 있음
가장 핵심은 "삭제되는 노드와 가장 값이 비슷한 노드"가 핵심! i) left sub tree의 최하단우측 node와 right sub tree의 최하단좌측 node 중 선택 (위 그림에서 30과 50중 선택) (오른쪽 서브트리의 제일 작은 값을 선택했다 가정) 이때, 여러 부모 및 자식 노드의 정보가 필요해서 매우 구현이 복잡해진다.
※ BST 구현
- BinaryNode.h
#include <iostream>
class BinaryNode{
protected:
int data;
BinaryNode* left;
BinaryNode* right;
public:
BinaryNode(int val = 0, BinaryNode *l = nullptr, BinaryNode *r = nullptr) : data(val), left(l), right(r) { }
void setData(int val) { data = val; }
void setLeft(BinaryNode* l) { left = l; }
void setRight(BinaryNode* r) { right = r; }
int getData() const { return data; }
BinaryNode* getLeft() const { return left; }
BinaryNode* getRight() const { return right; }
bool isLeaf() const { return left == nullptr && right == nullptr; }
};
트리의 높이를 h라 할 때, 일반적인 선형자료구조의 경우 O(h)가 된다. 이진트리의 경우, 보통 트리의 높이가 log h가 되므로 평균적인 시간복잡도는 O(log n)으로 매우 탁월함을 보여준다.
다만 이런 이진탐색트리의 경우 트리가 간혹 좌우로 불균형해져 트리의 높이가 log n이 만들어 지지 않는 경우가 발생할 수 있다. 이를 보완하는 방법으로 트리의 높이를 항상 log n으로 한정시키는 AVL 트리가 있다. Adelson Velskii Landis tree는 이진탐색트리의 노드의 불균형 문제를 해결한 트리로 밑에서 설명하겠다.
※ AVL 트리 (AdelsonVelskiiLandis Tree)
AVL 트리는 왼쪽과 오른쪽 sub tree간의 높이차가 1 이하인 BST이다. 이를 통해 O(log n)의 시간을 항상 보장한다!
탐색연산은 BST와 동일하지만 삽입, 삭제의 경우가 균형이 깨지기에 AVL 트리는 삽입과 삭제에 추가적 연산을 진행한다.
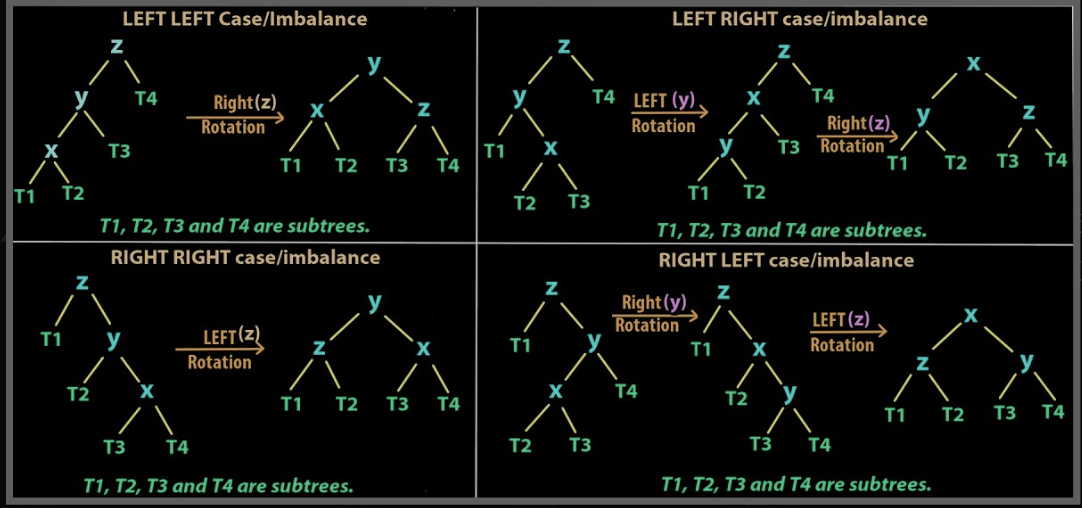
이런 균형이 깨진 트리를 다시 균형있게 만드는 방법으로 다음 4가지 방법이 있다.
새로 삽입된 노드 N과 N에서 가장 가까운 조상 노드 A에 대해 ‣ LL 타입: N이 A의 왼쪽 sub tree의 왼쪽 sub tree로 삽입 ‣ LR 타입: N이 A의 왼쪽 sub tree의 오른쪽 sub tree로 삽입 ‣ RR 타입:N이 A의 오른쪽 sub tree의 오른쪽 sub tree로 삽입 ‣ RL 타입:N이 A의 오른쪽 sub tree의 왼쪽 sub tree로 삽입
‣ LL 회전: 오른쪽으로 회전 ‣ LR 회전: 왼쪽-오른쪽으로 회전 ‣ RR회전: 왼쪽으로 회전 ‣ RL 회전: 오른쪽-왼쪽으로 회전
✯ AVL Tree의 Rotate Algorithm
☞ 단순 회전 알고리즘(LL, RR)
rotate_LL(A)
B <- A의 왼쪽 자식
B의 오른쪽 자식을 A의 왼쪽 자식으로 만든다.
A를 B의 오른쪽 자식 노드로 만든다.
rotate_RR(A)
B <- A의 오른쪽 자식
B의 왼쪽 자식을 A의 오른쪽 자식으로 만든다.
A를 B의 왼쪽 자식 노드로 만든다.
☞ 이중 회전 알고리즘 (RL, LR)
rotate_RL(A)
B <- A의 오른쪽 자식
rotate_LL(B)가 반환하는 노드를 A의 오른쪽 자식으로 만든다.
rotate_LR(A)
B <- A의 왼쪽 자식
rotate_RR(B)가 반환하는 노드를 A의 왼쪽 자식으로 만든다.
rotate_LL(A)
이와 달리 선형이 아닌 "계층적 구조 (hierarchical)"를 표현하기 위해 사용되는 자료구조인 트리(tree)에 대해 알아보고자 한다.
컴퓨터 저장장치의 디렉토리 구조도 계층적인 자료구조로 많은 상황에서 사용되기에 자료구조를 배우는 이유중 하나라 할 수 있다.
자료구조의 양대산맥이라 생각될 정도로 그래프만큼 많이 사용되며 자주 사용되는 자료구조이기에 잘 익혀두자!
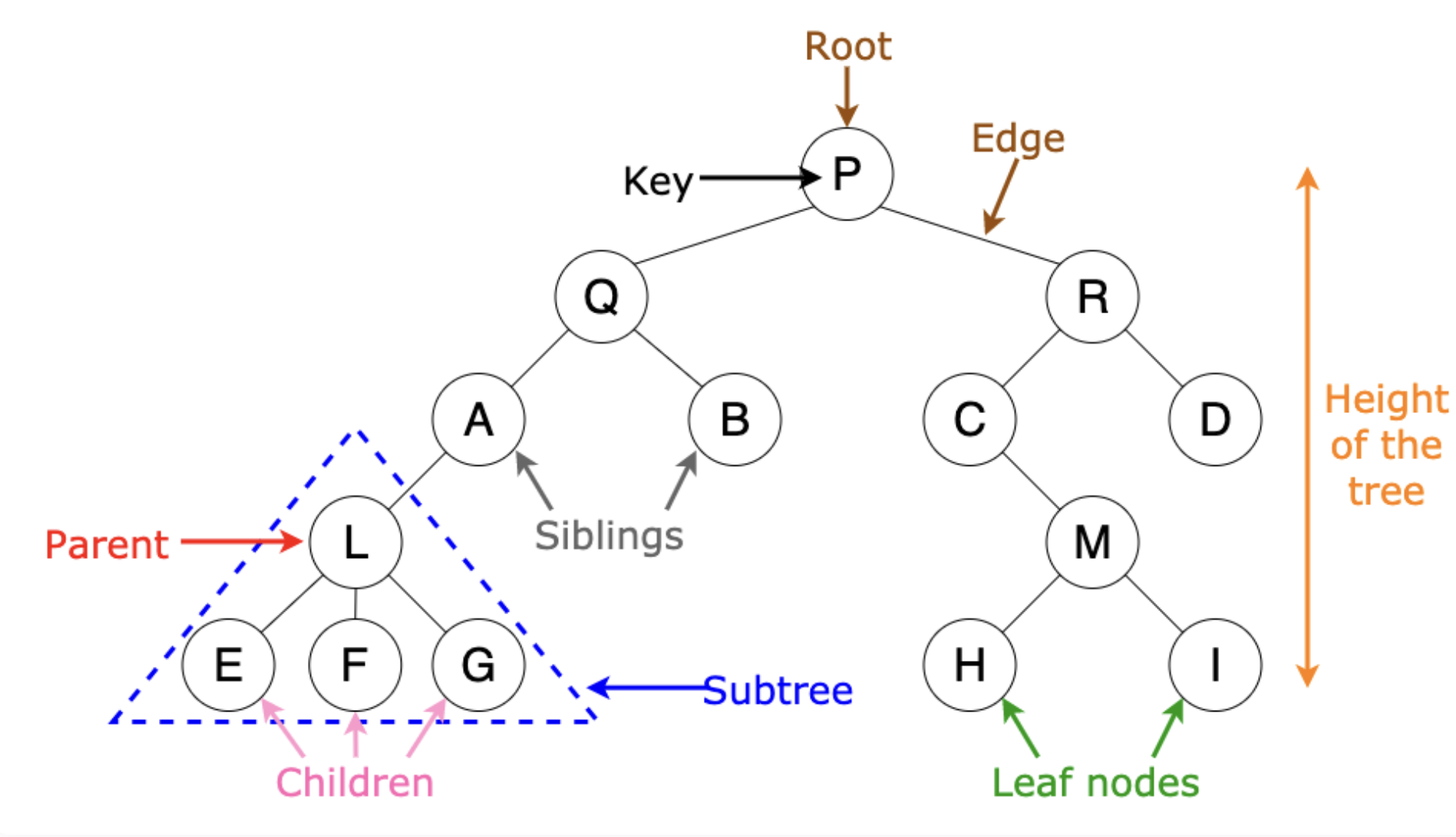
※ 트리 용어
트리의 구성요소로는 루트(root), 서브트리(subtree), 간선(edge), 노드(node) 등이 있다.
- 차수(degree): 어떤 node가 갖는 자식노드의 개수
- 레벨(level): 트리의 층 수로 root를 level 0이나 1로 매긴다.(책마다 조금씩 다름)
- 높이(height): 트리의 각 층에 번호를 매기는 것으로 트리의 높이는 최대 레벨을 통해 결정할 수 있다.
※ 이진트리 (Binary Tree)
모든 노드의 차수가 2 이하이며 왼쪽 서브트리와 오른쪽 서브트리가 반드시 구별되어야 한다.
n개의 노드는 n-1개의 간선(edge)를 가지며 높이가 h인 이진트리의 최대 노드 개수는 2^h - 1이다. n개의 노드를 갖는 이진트리의 높이는 다음과 같다. ⎡log(n+1)⎤ ≤ h ≤ n
포화이진트리(full binary tree): 모든 레벨의 노드가 꽉 차있는 트리, 높이가 h라면 총 2^h-1개의 노드를 갖는다. 완전이진트리(complete binary tree): 레벨 1~h-1까지는 모두 노드가 채워져 있고 마지막 레벨 h는 왼쪽~>오른쪽으로 순서대로 채워진 트리이다. (즉, 마지막 레벨의 노드가 꽉 차있지 않아도 됨)
대표적인 완전이진트리 예로는 힙(heap)이 있다.
※ 이진트리 순회 알고리즘
✯ 전위 순회 (preorder)
preorder(x)
if x != null
then print data(x); // 루트(x)노드 처리
preorder(LEFT(x)); // 왼쪽 subtree 방문
preorder(RIGHT(x)); // 오른쪽 subtree 방문
✯ 중위 순회 (inorder)
inorder(x)
if x != null
then inorder(LEFT(x)); // 왼쪽 subtree 방문
print data(x); // 루트(x)노드 처리
inorder(RIGHT(x)); // 오른쪽 subtree 방문
✯ 후위 순회 (postorder)
postorder(x)
if x != null
then postorder(LEFT(x)); // 왼쪽 subtree 방문
postorder(RIGHT(x)); // 오른쪽 subtree 방문
print data(x); // 루트(x)노드 처리
※ 이진트리 노드 개수 및 높이 구하는 알고리즘
✯ node 개수 구하기
getCount(x)
if x == null
then return 0;
else return 1 + getCount(LEFT(x)) + getCount(RIGHT(x));
✯ leaf node 개수 구하기
getLeafCount(x)
if x == null
then return 0;
if LEFT(x) == null and RIGHT(x) == null
then return 1;
else return getLeafCount(LEFT(x)) + getLeafCount(RIGHT(x));
✯ height 구하기
getHeight(x)
if x == null
then return 0;
else return 1 + max(getHeight(LEFT(x)), getHeight(RIGHT(x)));
※ 이진트리 구현
✯ BinaryNode.h
#include <iostream>
class BinaryNode{
protected:
int data;
BinaryNode* left;
BinaryNode* right;
public:
BinaryNode(int val = 0, BinaryNode *l = nullptr, BinaryNode *r = nullptr) : data(val), left(l), right(r) { }
void setData(int val) { data = val; }
void setLeft(BinaryNode* l) { left = l; }
void setRight(BinaryNode* r) { right = r; }
int getData() const { return data; }
BinaryNode* getLeft() const { return left; }
BinaryNode* getRight() const { return right; }
bool isLeaf() const { return left == nullptr && right == nullptr; }
};
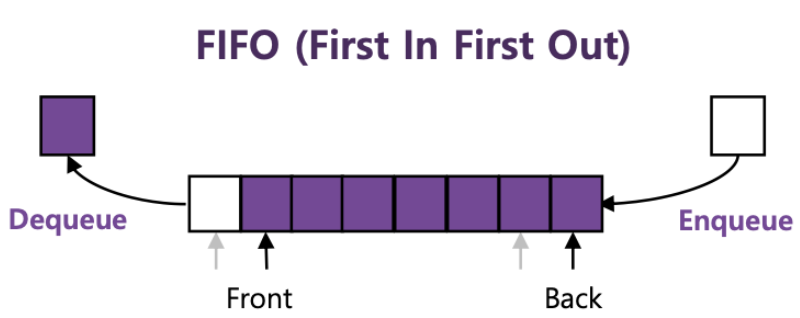
- 스택,큐: 전단(front), 후단(rear)에 접근방식이 제한되어 새로운 객체 삽입 삭제 시 중간에 하는 것을 허용X
- 리스트: 위와 달리 임의의 위치에 있는 항목에 대한 연산이 되기에 선형 자료구조들 중 가장 활용이 자유롭다.
cf-2) 연결리스트와 리스트의 용어의 차이는 무엇일까?
- 리스트: 특정 자료구조를 말하는 것으로 대응되는 키워드는 스택, 큐 등이다
- 연결리스트: 그런 자료구조를 구현하는 프로그래밍 기법으로 대응되는 키워드는 배열과 같은 뉘앙스이다.
※ 선형 리스트 (Linear List)
리스트(list) 또는 선형 리스트(linear list)라 불리는 자료구조는 항목들이 순서나 위치를 갖는 것이다.
- array, stack, queue, deque, list . . .
이때, 리스트와 집합이 다르다는 것을 알아야 한다.
- list(리스트): 각 항목간의 리스트에 들어있는 항목들 사이 순서가 존재한다.
- set(집합): 각 항목간의 순서의 개념이 없다.
또한 리스트는 자유로운 데이터 접근 방식으로 다양한 연산이 가능하다.
insert(pos, item) // 리스트의 pos위치의 새 요소, item 삽입
delete(pos) // 리스트의 pos위치의 요소 삭제
getEntry(pos) // 리스트의 pos위치의 요소 반환
find(item) // 리스트에 item이 있는지 검사
replace(pos, item) // 리스트의 pos위치에 있는 요소를 item으로 바꿈
isEmpty() // 리스트가 비어있는지 검사
isFull() // 리스트가 가득 차있는지 검사
size() // 리스트 안의 요소개수를 반환
display() // 리스트 안의 모든 요소 출력
리스트를 구현하는 방식은 배열을 사용하는 방법과 연결리스트 방식으로 나눌 수 있는데 보통 연결리스트를 사용한다.
배열 구현의 장점: ADT를 가장 간단하게 구현할 수 있다.
배열 구현의 단점: 요소의 개수에 제한이 생기며 메모리 낭비 및 비효율성과 삽입 삭제시 많은 요소의 이동 등이 있다.
연결리스트의 장점: 필요 시에만 노드를 동적으로 생성해 연결하며 연속된 메모리 공간을 할당할 필요도 없다.
연결리스트의 단점: 배열에 비해 구현이 복잡하다.(= 프로그래밍이 어려워지고 오류발생가능성이 커짐)
또한 할당과 해제가 빈번하게 일어나 프로그램이 느려질 수 있다는 단점도 존재한다.
따라서 보통 포인터를 사용한 연결리스트(Linked List)로 구현하는데, 이 방법도 다음 3가지 방법으로 나눌 수 있다.
단일 연결리스트 / 원형 연결리스트 / 이중 연결리스트
이때, NULL의 설정을 통해 마지막 노드를 표현한다.
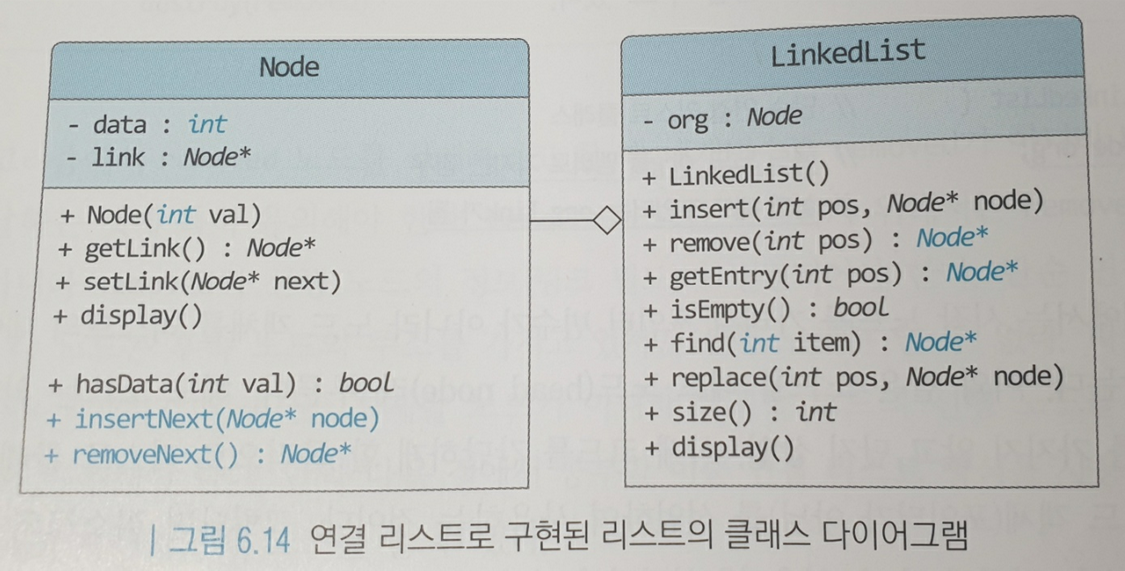
※ 연결 리스트 구현
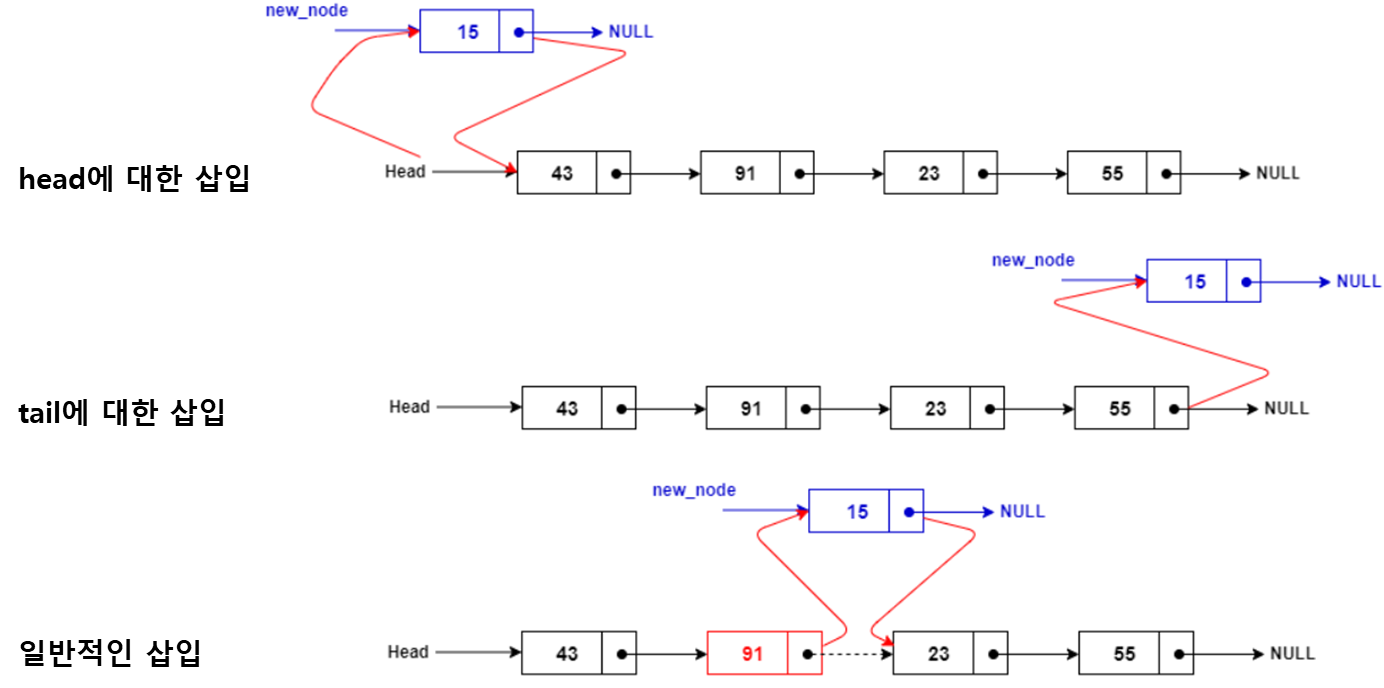
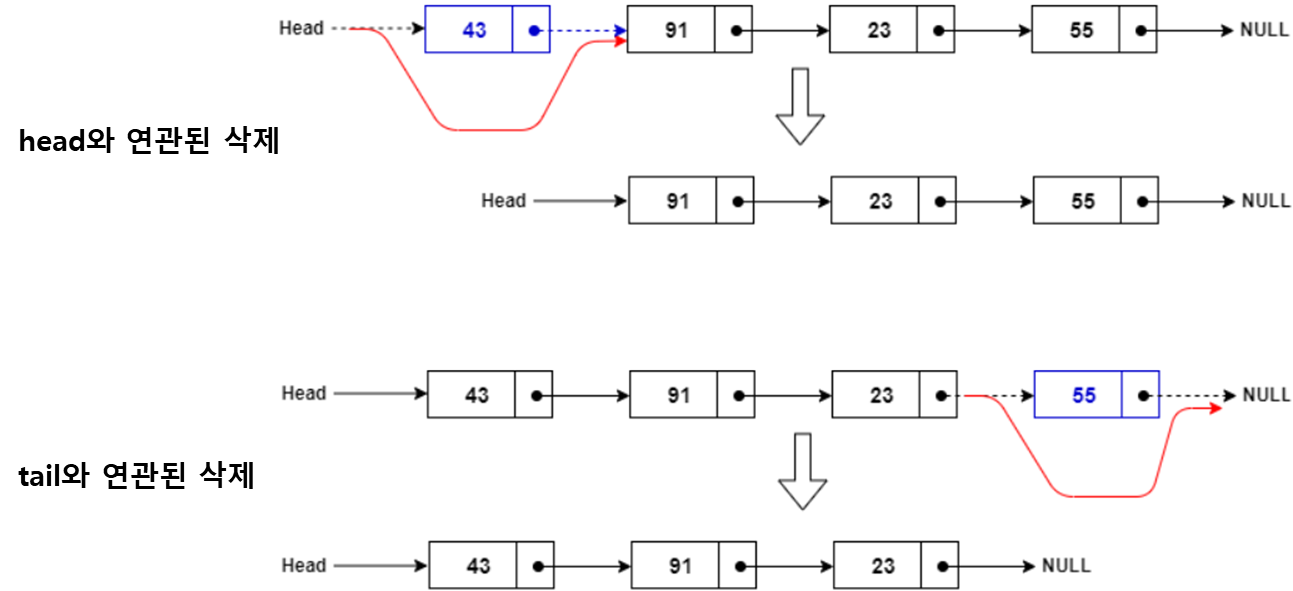
§ 단일 연결리스트 (Single Linked List)
- 삽입과정 (insertion)
- 삭제과정 (deletion)
[구현]
[Node class_header file]
#include <iostream>
class Node{
private:
int data; // node의 data 필드
Node *link; // 다음 node를 가리키는 포인터변수
public:
Node(int val) : data(val), link(nullptr) {}
Node *getLink() { return link; }
void setLink(Node *next) { link = next; }
void display(){ printf(" <%2d>", data); }
bool hasData(int val) { return data == val;}
void insertNext(Node *node) {
if (node != nullptr){
node->link = link; // 새로운 node의 link를 선행하는 node와 연결
link = node; // 후속 node의 link와 새 node를 연결
}
}
Node *removeNext(){
Node *removed = link;
if (removed != nullptr)
link = removed->link; // 현재 node의 link를 다음다음 node의 data와 연결
return removed; // 삭제된 node주소를 반환해야 함. 그렇지 않으면 삭제된 node메모리가 해제되지 않고 위치를 잃어버림
}
};
[Linked List class_header file]
[main_cpp file]
#include "LinkedList.h"
int main() {
LinkedList list;
list.insert(0, new Node(10)); // 리스트 맨 앞 10 삽입
list.insert(0, new Node(20)); // 리스트 맨 앞 20 삽입
list.insert(1, new Node(30)); // 리스트 1위치에 30 삽입
list.insert(list.size(), new Node(40)); // 리스트 마지막에 40 삽입
list.insert(2, new Node(50));
list.display();
list.remove(2); // 리스트 2위치 삭제
list.remove(0); // 리스트 맨 앞 삭제
list.replace(1, new Node(365)); // 리스트 1위치 값 365로 변경
list.display();
list.clear(); // 리스트 모든 항목 삭제
list.display();
}
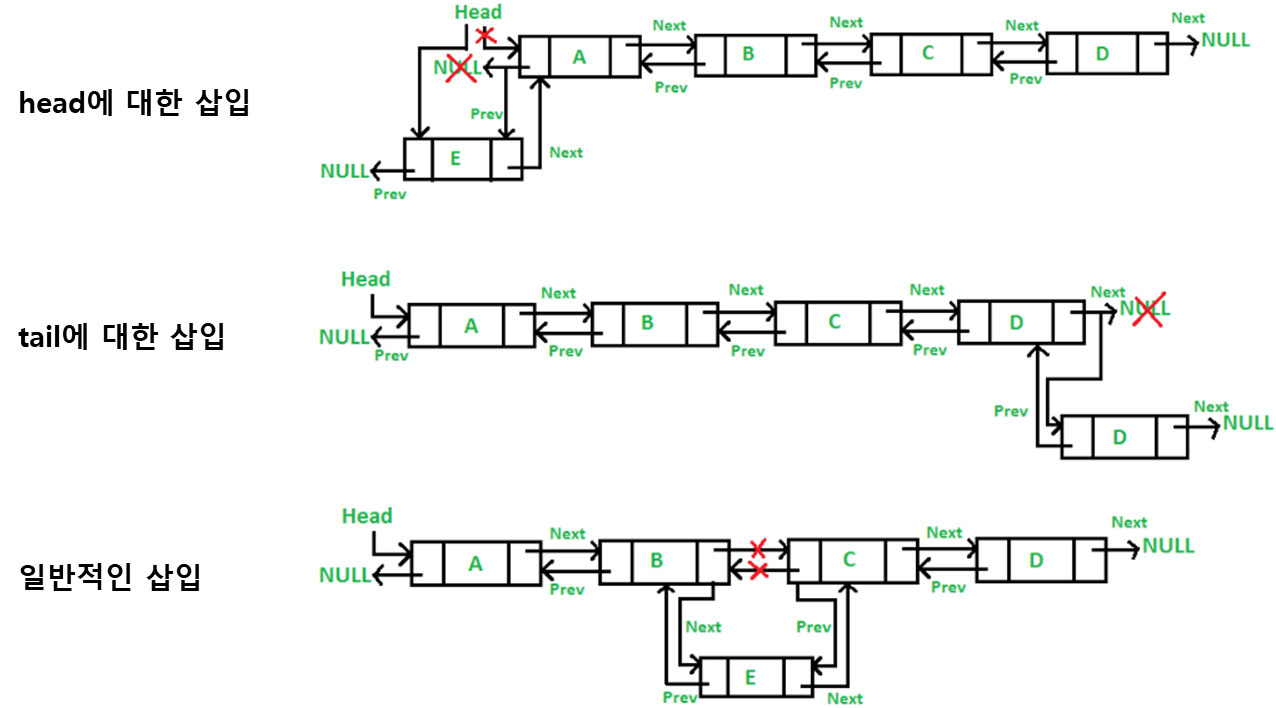
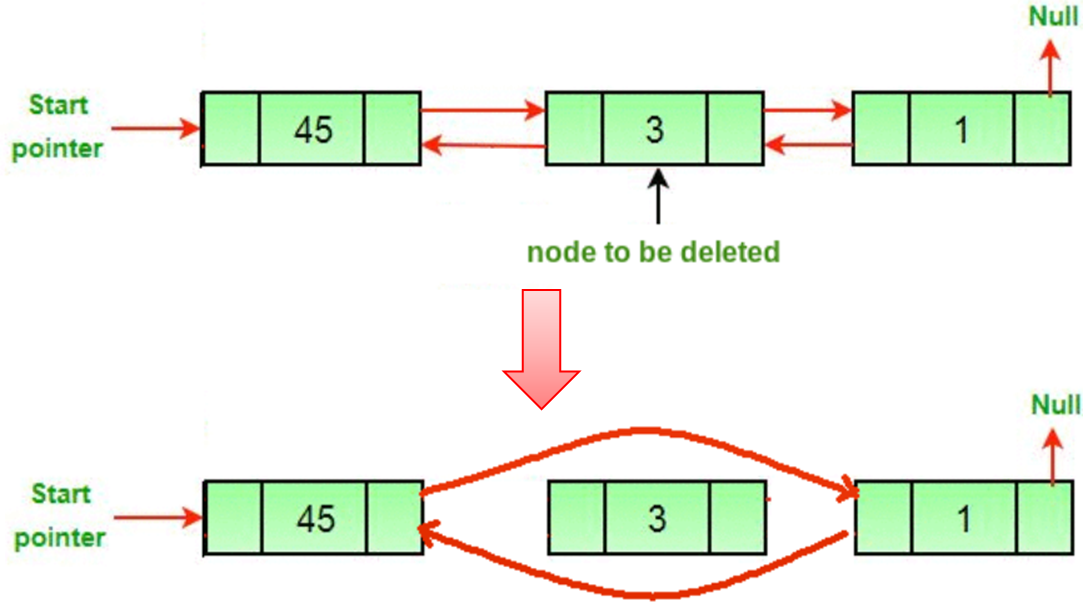
§ 이중 연결리스트 (Doubly Linked List)
이중 연결리스트에서 임의의 node를 가리키는 포인터를 p라하면 아래와 같은 관계가 항.상! 성립한다.
p == p->next->prev == p->prev->next
- 삽입과정 (insertion)
- 삭제과정 (deletion)
[구현]
[Node2 class_header file]
#include <iostream>
class Node2{
private:
int data; // node의 data 필드
Node2 *prev; // 선행 node를 가리키는 포인터
Node2 *next; // 후속 node를 가리키는 포인터
public:
Node2(int val) : data(val), prev(nullptr), next(nullptr) {}
Node2 *getPrev() { return prev; }
Node2 *getNext() { return next; }
void setPrev(Node2 *p) { prev = p; }
void setNext(Node2 *n) { next = n; }
void display() { printf(" <%2d>", data); }
bool hasData(int val) { return data == val; }
void insertNext (Node2 *node) {
if (node != nullptr){
// 삽입 node의 prev가 삽입node의 prev node의 data를 가리킴
node->prev = this;
// 삽입 node의 next가 삽입node의 next node의 data를 가리킴
node->next = next;
// 삽입 node의 next node의 prev link가 삽입node의 data를 가리킴
if (next != nullptr)
next->prev = node;
// 삽입 node의 prev node의 next link가 삽입node의 data를 가리킴
next = node;
}
}
Node2 *remove() {
if (prev != nullptr)
return prev->next = next; // 현재 node기준 선행 node의 link가 후속 node의 data를 가리킴
if (next != nullptr)
return next->prev = prev; // 현재 node기준 후속 node의 link가 선행 node의 data를 가리킴
}
};
[DBLinkedList class_header file]
[main_cpp file]
#include "DBLinkedList.h"
int main() {
DBLinkedList list;
list.insert(0, new Node(10)); // 리스트 맨 앞 10 삽입
list.insert(0, new Node(20)); // 리스트 맨 앞 20 삽입
list.insert(1, new Node(30)); // 리스트 1위치에 30 삽입
list.insert(list.size(), new Node(40)); // 리스트 마지막에 40 삽입
list.insert(2, new Node(50));
list.display();
list.remove(2); // 리스트 2위치 삭제
list.remove(0); // 리스트 맨 앞 삭제
list.replace(1, new Node(365)); // 리스트 1위치 값 365로 변경
list.display();
list.clear(); // 리스트 모든 항목 삭제
list.display();
}
※ List Container (STL)
1. 관련 함수
§ iterator
begin(): beginning iterator 반환
end(): end iterator 반환
*iterator: iterator가 가리키는 원소에 접근
front(): 첫번째 원소 반환
back(): 마지막 원소 반환
§ 삽입 (insertion)
push_front(element): 리스트 맨 앞에 원소 추가
push_back(element): 리스트 맨 뒤에 원소 추가
insert(iterator, element): iterator가 가리키는 부분의 앞에 원소 추가
§ 삭제 (deletion)
pop_front(): 리스트 맨 앞의 원소 삭제
pop_back(): 리스트 맨 뒤의 원소 삭제
erase(iterator): iterator가 가리키는 부분의 원소 삭제
§ etc.
empty(): 리스트가 비어있는지 여부
size(): 리스트 사이즈 반환
2. 예시
#include <iostream>
#include <list>
using namespace std;
int main()
{
// 리스트 생성
list<int> a;
// 원소 추가
a.push_back(22);
a.push_back(33);
a.push_front(11);
a.push_back(44);
a.push_back(55);
// 반복자 생성
list<int>::iterator iter = a.begin();
// 리스트 출력
for(iter=a.begin(); iter!=a.end(); iter++)
{
cout << *iter << endl; // 원본 리스트: 11 22 33 44 55
}
cout << "" << endl;
cout << "" << endl;
// 원소 삭제
a.pop_front();
a.pop_back();
for(iter=a.begin(); iter!=a.end(); iter++)
{
cout << *iter << endl; // 원소 삭제후 리스트: 22 33 44
}
cout << "" << endl;
// 리스트 사이즈 출력
cout << a.size() << endl; // 3 출력( 22, 33, 44 이므로)
// 리스트가 비어있는가
cout << a.empty() << endl; // 비어있지 않으므로 0 반환
// 리스트 첫번째 원소 출력
cout << a.front() << endl; // 22
// 리스트 마지막 원소 출력
cout << a.back() << endl; // 44
cout << "" << endl;
// 반복자 2번째 위치로 이동
iter++; // 반복자가 두번째 원소(33)를 가리킴
iter++; // 반복자가 세번째 원소(44)를 가리킴
a.insert(iter, 55555);
for(iter=a.begin(); iter!=a.end(); iter++)
{
cout << *iter << endl; //세번째 원소(44) 전에 추가하는 것(22,55555,33,44)
}
}
int findMacVal(int arr[], int len){
int max = arr[0];
for (int i = 1; i < len; i++) {
if (max < arr[i])
max = arr[i];
}
return max;
}
int main() {
int arr_len = 0;
cin >> arr_len;
int arr[arr_len];
for (int i = 0; i < arr_len; i++) {
cin >> arr[i];
}
int MaxVal = findMacVal(arr, arr_len);
cout << MaxVal << endl;
}
- 배열의 이름이 포인터 역할을 하기에 함수 호출 시 배열의 이름을 매개변수로 전달하면 호출되는 함수에서는 이 주소를 이용해 배열의 모든 요소들을 접근할 수 있다.
- 이때, 배열의 길이도 매개변수로 함께 전달해야 한다.
이는 2차원 배열도 마찬가지로 2차원 배열은 가로크기가 5일 때만 적용가능한 함수가 되어버린다.
int findMacVal(int arr[][5], int h, int w){
int max = 0;
for (int i = 0; i < h; i++) {
for (int j = 0; j < w; j++) {
if (max < arr[i][j])
max = arr[i][j];
}
}
return max;
}
Q. 만약 배열의 길이를 모르거나 매개변수로 전달하기 싫다면 어떻게 해야하나요?
A. Vector 클래스를 배열대신 사용한다면 가능하다.
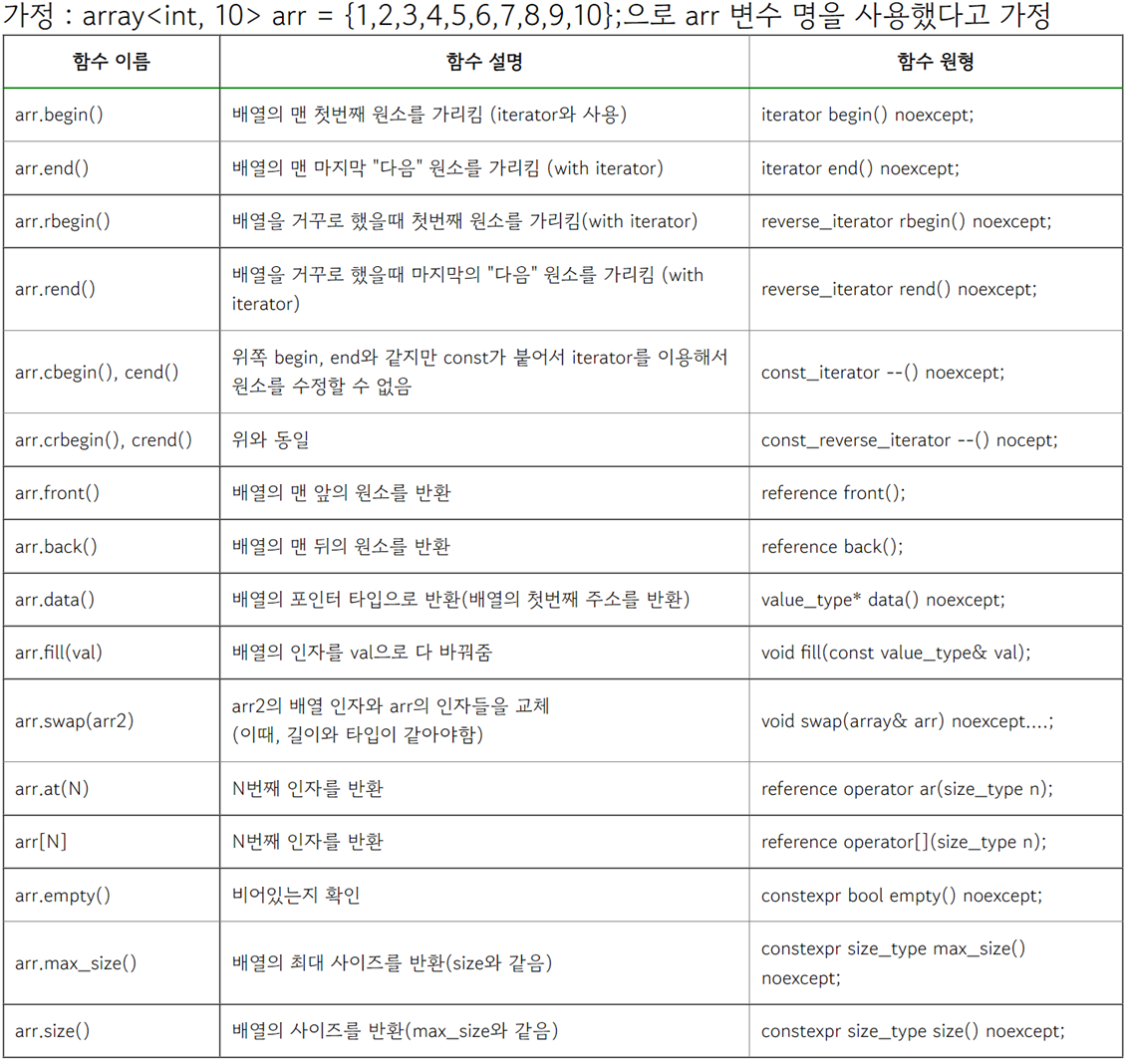
※ array container (std::array) _ 고정크기배열
- memory를 자동으로 할당하고 해제하며 원소의 타입과 배열크기를 매개변수로 사용하는 템플릿클래스이며
다음과 같이 사용할 수 있다.
#include <iostream>
#include <array>
using namespace std;
int main(){
array<int, 3> arr1;
arr1[0] = 1;
cout << arr1[0] << endl;
array<int, 5> arr2;
for(int i=0; i < arr2.size(); i++){
cin >> arr2[i];
}
for (int i = 0; i < arr2.size(); i++) {
cout << arr2[i] << ' ';
}
}
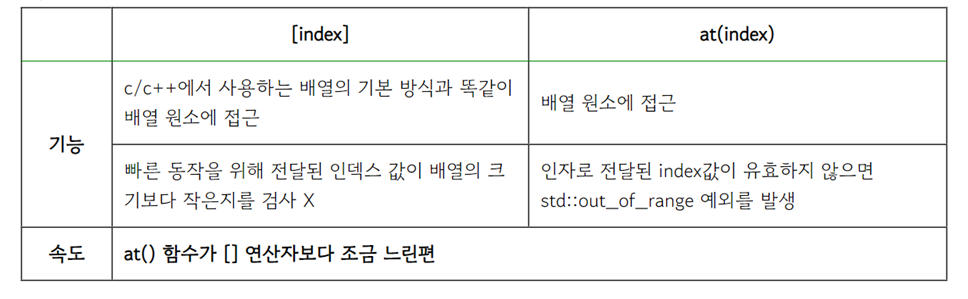
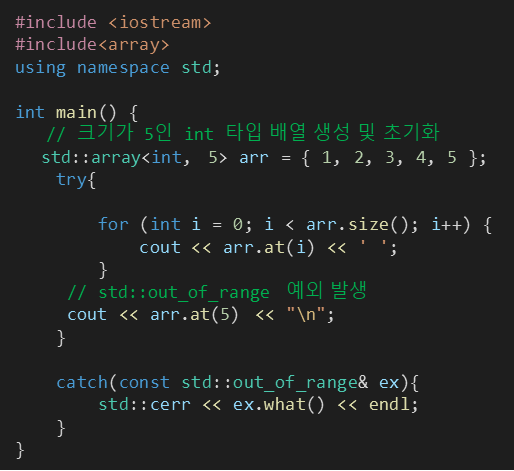
위의 std::array에서는 배열원소에 접근할 때 [ ]를 사용했는데, arr.at() 함수를 사용해서 접근할 수도 있다.
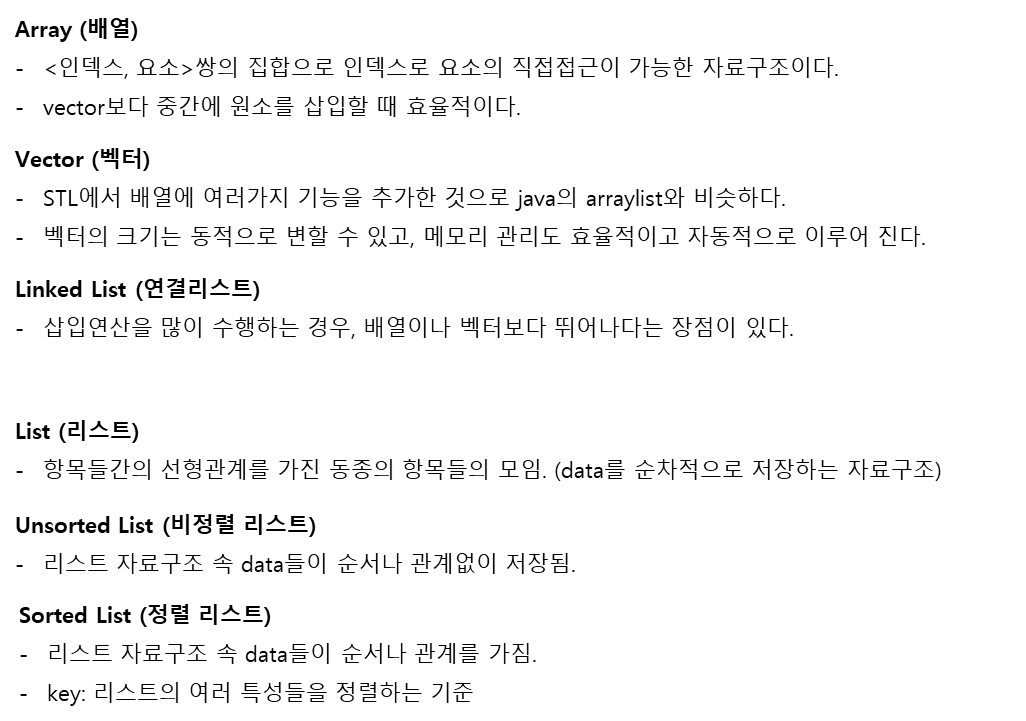
C++의 STL에 내장되어 있는 템플릿 클래스로 배열과 유사하며 Java의 ArrayList와 비슷한 기능을 한다.
배열에 여러가지 기능을 추가한 것으로 기존의 배열에서 불편했던 점을 개선하여 일반화 시킨 것이다.
- 벡터 컨테이너는 동적배열의 클래스 템플릿이다.
- 벡터 객체는 요소가 추가,삭제될 때 마다 자동으로 메모리를 재할당해 크기를 동적으로 변경한다.
- 임의의 위치에 있는 원소 접근과, 뒤에서 원소를 추가하는 연산은 O(1) (분할상환분석)을 보장한다.
- vector<x> 타입 vec이 소요하는 메모리는 대략 sizeof(vector<X>) + vec.size()*sizeof(X)이다. (약 12byte)
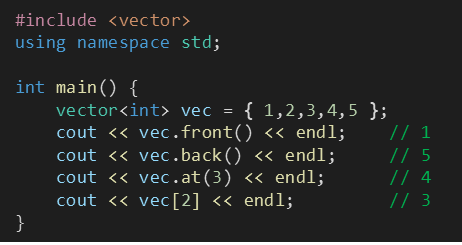
※ vector 선언방법
#include <vector>
using namespace std;
vector<자료형> 변수명(숫자) //숫자만큼 벡터 생성 후 0으로 초기화
vector<자료형> 변수명(숫자, 변수1); //숫자만큼 벡터 생성 후 변수1으로 모든 원소 초기화
vector<자료형> 변수명{숫자, 변수1, 변수2, 변수3, ...}; // 벡터 생성 후 오른쪽 변수 값으로 초기화
vector<자료형> 변수명[]={ {변수1, 변수2}, {변수3, 변수4}, ...} //2차원 벡터생성 (열은 고정, 행 가변)
vector<vector <자료형>> 변수명 //2차원 벡터생성 (열, 행 가변)
ex);
vector<int> vec1; // 크기가 0인 벡터 선언
vector<int> vec2(10); // 크기가 10인 벡터 선언
vector<int> vec3(10, 3); // 크기가 10이고 모든 원소가 3으로 초기화된 벡터
vector<int> vec4 = { 1,2,3,4,5 }; // 크기가 지정한 초기값으로 이루어진 벡터
vector<int> vec5[] = { {1,2},{3,4} }; // 벡터 배열 생성(행은 가변인지만, 열은 고정)
vector<vector<int>> vec6; // 2차원 벡터 생성(행과 열 모두 가변)
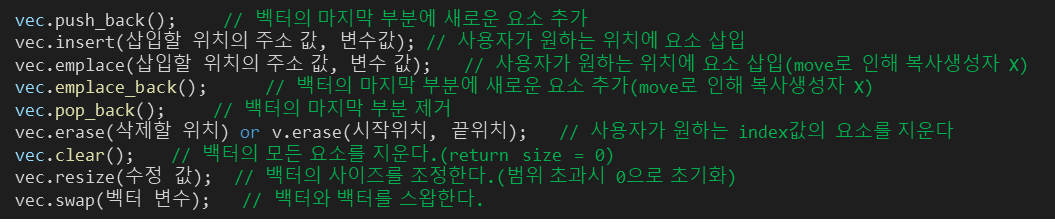
※ vector 요소 삽입, 제거, 변경
- insert(),push_back()같은삽입연산자는 많은경우 list보다vector에 좀 더 효율적이다.